G-control MP
Gcontrol.RdA harvest control rule proposed by Carl Walters that uses trajectory in inferred surplus production to make upward/downward adjustments to TAC recommendations
Usage
Gcontrol(
x,
Data,
reps = 100,
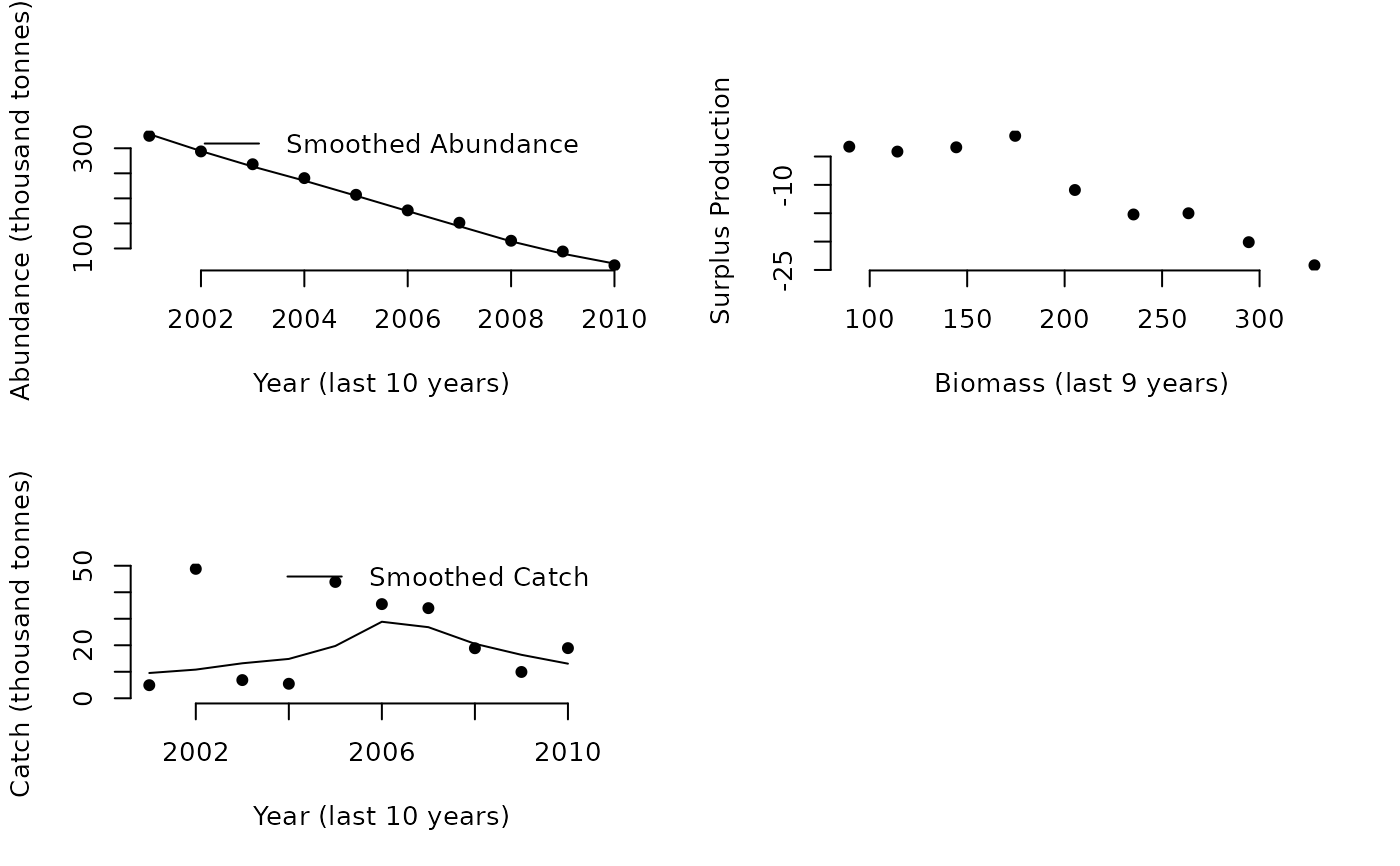
plot = FALSE,
yrsmth = 10,
gg = 2,
glim = c(0.5, 2)
)Arguments
- x
A position in the data object
- Data
A data object
- reps
The number of stochastic samples of the MP recommendation(s)
- plot
Logical. Show the plot?
- yrsmth
The number of years over which to smooth catch and biomass data
- gg
A gain parameter
- glim
A constraint limiting the maximum level of change in quota recommendations
Value
An object of class Rec-class with the TAC slot populated with a numeric vector of length reps
Details
The TAC is calculated as:
$$\textrm{TAC} = \textrm{SP} \left(1-gG\right)$$
where \(\textrm{SP}\) is the predicted surplus production for the next year,
g is a gain parameter, and G is the slope of surplus production
as a function of biomass over the last yrsmth years.
The change in TAC is bounded by the glim argument, which by default does not allow
the TAC to decrease by more than half or increase more than twice the last annual catch.
Rendered Equations
See Online Documentation for correctly rendered equations
References
Carruthers et al. 2015. Performance evaluation of simple management procedures. ICES J. Mar Sci. 73, 464-482.
See also
Other Index methods:
GB_slope(),
GB_target(),
ICI(),
Iratio(),
Islope1(),
Itarget1(),
Itarget1_MPA(),
ItargetE1()
Examples
Gcontrol(1, Data=MSEtool::Atlantic_mackerel, plot=TRUE)
#> Error in if (all(round(TAC/mean(TAC, na.rm = TRUE), 1) == 1)) { points(max(years), mean(TAC, na.rm = TRUE), pch = 16, cex = 2, col = "blue") text(max(years), mean(TAC, na.rm = TRUE), "TAC", pos = 1, col = "blue")} else { boxplot(TAC, add = TRUE, at = max(years), col = "blue", width = 1, outline = TRUE, axes = FALSE) text(max(years), quantile(TAC, 0.95, na.rm = TRUE), "TAC", pos = 3, col = "blue")}: missing value where TRUE/FALSE needed